Some more benchmarks
25/Oct 2010
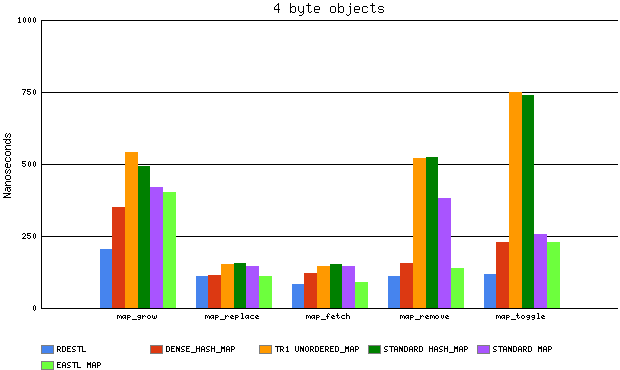
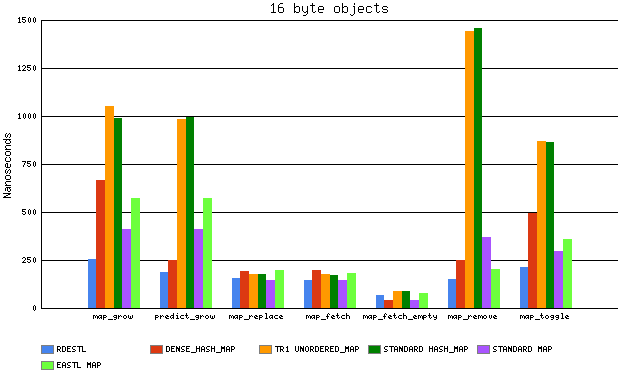
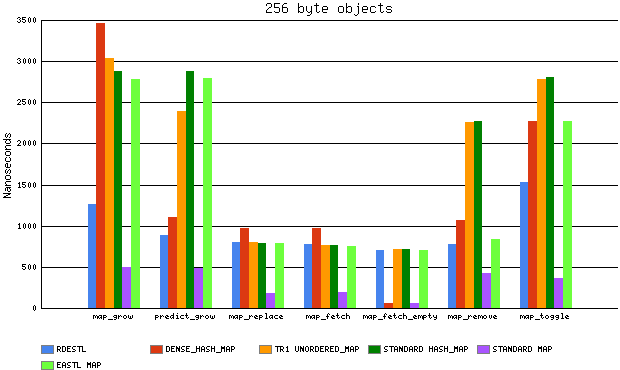
Gave tr1::unordered_map a try, it seems to do perfectly average, nothing spectacular, nothing awful, except for predict_grow with 4 byte objects, where it’s almost 10x slower than the next implementation (that’s not an anomaly, it happens every time).
I also found a bug in RDE where I overoptimized it a little bit - could result in a crash when searching for item that’s just been removed. It slowed fetch by about 3%, however later I found a way to remove some branches and sped it up by ~6% again, so final version is even faster. It made fetch_empty much slower (no early exit), but I don’t care about this scenario too much (how often do you actually care about quick lookup in an empty map?) and am willing to trade it for higher performance in 99% of cases. x86 (desktop machine) graphs below (two versions for 4 byte objects, as TR1 skewed the results quite a bit):

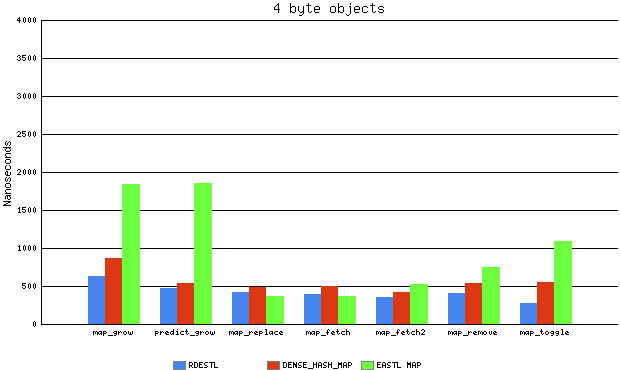
I also ran tests on X360 (only dense_hash_map, EASTL & RDE). It should be said, they’re not terribly realistic, especially ‘fetch’, after all it’s not normal to just sequentially fetch 50k objects one by one. To make it at least a tiny bit more interesting I added fetch2 test, which does the following:
objects are fetched in a random order, not sequentially,
every 64-th iteration, it tries to find item that’s not present in the map.
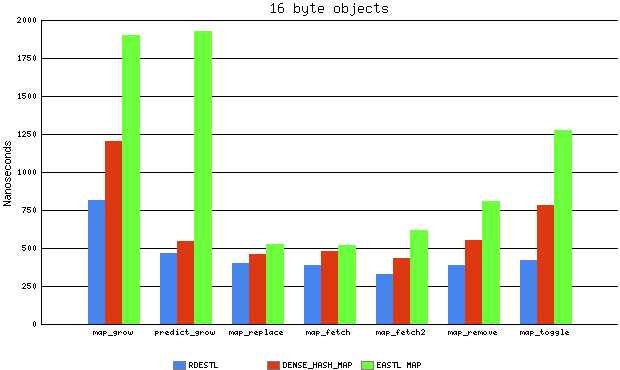
Xenon results (nice thing about them is they’re much more consistent, differ by maybe 1-3ns from run to run):

Obviously, it’s still quite far from real-life applications, so it’s best to just plug in some of those implementations and give them a test drive.
Old comments
admin 2011-01-19 01:29:23
Sure, but it’s not exactly ‘my’ test suite. I use Google’s sparsehash - http://code.google.com/p/google-sparsehash/ (time_hash_map.cc).
Mike 2011-01-18 11:17:43
Could you please provide a source code of your test suite? I find the results you provided somehow confusing, because it contradicts the results of my company’s internal benchmarks for stl containers. Maybe you’re using the custom hash function for std::hash_map\unordered_map or something like that..
xp 2010-10-26 15:06:18
very nice! looking forward to “move semantics” in RDESTL.